Поиск карты глубины вебкамерой. Средний вектор окрестности 1.
Полученные вектора предыдущей программы пропустим через специальный фильтр. Вычислим для каждого блока векторов среднее значение в окрестности равной единице (дискретная, блокового размера). И так каждый кадр: найти вектора, размыть. Результат работы этого алгоритма можно увидеть в программе.
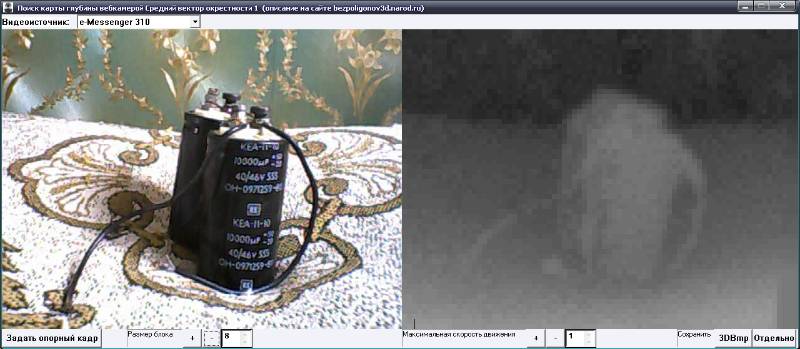
Запускаем программу, выбираем видеоисточник. Делаем размер блока равный 32 точки. Задаём опорный кадр. Далее, медленно ведём по салазке вебкамеру. Смотрим нужную градацию глубины. Потом уменьшаем размер блока до 16. Если карта правильная, то уменьшаем ещё раз до блока 8. Карта обычно затекает правильно. Дальнейшее уменьшение блока сильно искажает карту (оптимальный размер блока 8 точек). Теперь можно сохранить результат либо в 3Dbmp или отдельно в опорный кадр и карту глубины.