Карта глубины видимой части
Теперь попробуем получить карту глубины по алгоритму “Муть” не для одного кадра, а для двух.
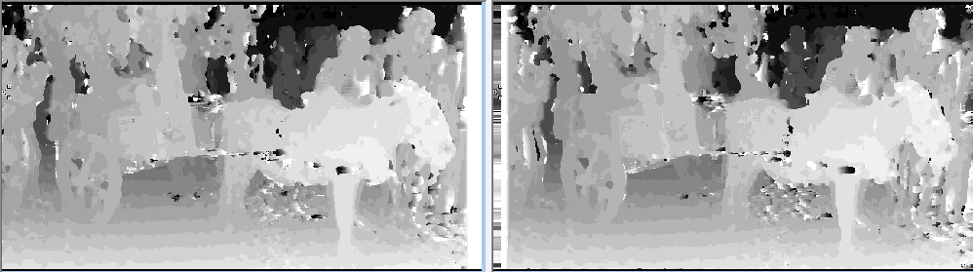
И чтобы уменьшить неточности, сделаем так. У каждого кадра создадим двухмерную карту векторов (две координаты для каждой точки). Эти вектора показывают смещение точки на втором кадре. А карту глубины получаем из карты векторов одномерную (она нужна только для просмотра). Далее, по идее, вектора первого кадра будут равняться векторам другого кадра, только со знаком минус. А те, что не равняются, будет признаком непопадания точек и обозначим их черным цветом.
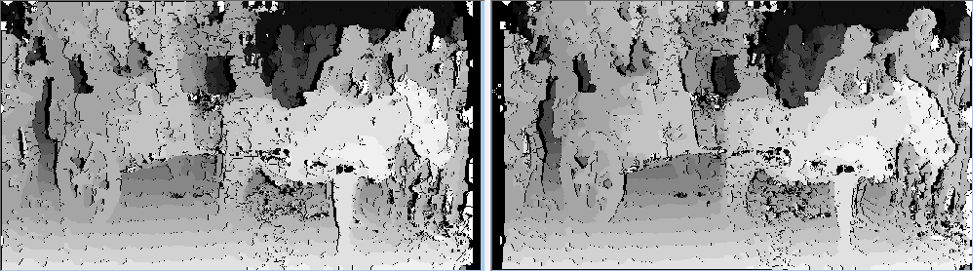
И после этой картины стало заметно затеняемые объекты. А главное, эти точки (затеняемые) никогда не попадают на свои места. И всё от того, что их видно только с одного кадра. От сюда следует, карта векторов, полученная по параллаксам из стереоизображения, будет дырявой….
Далее, проверим все чёрные точки одного кадра на незанятость мест (чёрные точки) другого кадра. Если не будет свободного места, то обозначим её красным цветом. Это будет истинная затеняемая.
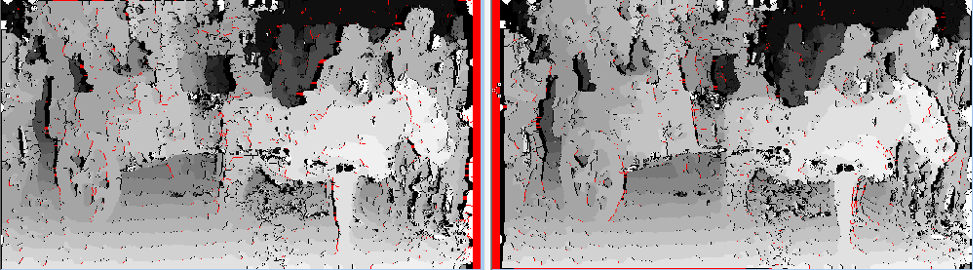
По картинке видно неполность заполнения красным цветом затеняемых участков. Это означает наличие свободных точек, для которых есть незанятые места, в силу неточности карты векторов. Идеальная карта будет выглядеть без этих свободных точек (не считая горизонта).